
Moteurs perfectionnés
a. Moteurs à commutation électronique (MCÉ)
Un moteur MCE est un moteur c.c. à aimants permanents à commutation électronique (Figure 6-1).
Un dispositif électronique fournit aux bobines des tensions pilotées avec précision, et fait appel à des capteurs de position pour la synchronisation.
Figure 6-1 : Moteur à commutation électronique (MCE)
Le dispositif de commande électronique peut être programmé de façon à faire varier les caractéristiques couple-vitesse du moteur pour une grande diversité d’applications de fabricants telles que ventilateurs et entraînements.
Bien que ces moteurs soient actuellement plus coûteux que ceux des technologies concurrentes, leur rendement supérieur et leurs caractéristiques d’utilisation plus souples les rendent cependant intéressants.
Un moteur MCE est essentiellement un moteur c.c. sans balais et doté de commandes de couple et de vitesse totalement intégrées (réf. 3). Les applications classiques comprennent les entraînements à couple variable pour ventilateurs et pompes, la réfrigération commerciale et les appareils électroménagers.
Dans le cas des moteurs de chaudière, le rendement peut être de 20 à 30 points de pourcentage plus élevé que celui d’un moteur à induction classique à pleine charge. En outre, pour une circulation d’air constante, les moteurs MCE présentent assurément un avantage par rapport aux moteurs classiques de soufflantes à entraînement direct. À demi-vitesse, le moteur MCE va consommer aussi peu que 10 % de l’énergie consommée par un moteur de soufflante à plusieurs vitesses.
Pour les appareils électroménagers tels que les machines à laver le linge, le moteur MCE peut remplacer la transmission mécanique classique grâce à sa gamme étendue de caractéristiques couple-vitesse.
b. Moteurs à réluctance et à commutation (SRM)
Le moteur à réluctance et à commutation présente l’avantage d’un couple élevé à basse vitesse et d’une gamme de vitesses très étendue (Figure 6-2).
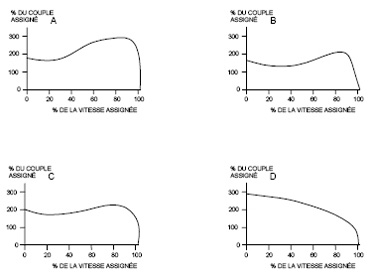
Figure 6-2 : Moteur à réluctance et à commutation (SRM)
Comme dans le cas des moteurs MCE, un dispositif électronique assure l’alimentation des bobinages en une séquence précise, et fait appel à des capteurs de position de rotation pour la synchronisation.
Les moteurs à réluctance et à commutation sont employés chaque année dans la fabrication de plusieurs centaines de milliers de machines à laver haut de gamme, ce qui élimine tout système de transmission (réf. 20).
c. Moteurs à aimants permanents
En combinant l’électronique de puissance à de nouveaux matériaux à intensité magnétique élevée, on a pu mettre au point des moteurs à haut rendement à vitesse variable dont la gamme de puissance va de moins d’un HP à plusieurs HP. Ces moteurs et leurs dispositifs de commande sont généralement spécialisés et sont donc incorporés dans les produits de série.
d. Autres moteurs perfectionnés
Moteurs Written Pole®
Les moteurs Written Pol (on dit aussi à pôles inscriptibles) sont des moteurs c.a. monophasés spéciaux dans lesquels la position des pôles magnétiques peut être modifiée pendant le fonctionnement (Figure 6-3) (Réf. 4).
Dans ce type de moteurs, les pôles à aimant “permanent”' sont inscrits de façon continue et instantanée sur une couche du rotor par un enroulement d’excitation disposé sur le stator. Les pôles magnétiques sont inscrits en un point différent sur le rotor à chaque tour alors que la vitesse du rotor varie. La configuration des pôles se conserve ainsi à une vitesse pôles/sec constante.
Contrairement aux moteurs classiques, la plupart des moteurs Written Pole sont constitués d’un rotor extérieur qui tourne autour d’un stator interne. Cette structure inversée engendre un effet de volant d’inertie qui permet à la machine de faire face aux perturbations d’alimentation de courte durée. Une génératrice triphasée incorporée au moteur fournit l’énergie aux charges extérieures pendant une durée à pleine charge allant jusqu’à 15 secondes.
La construction du rotor à base d’aimants permanents diminue le courant de démarrage. Les moteurs Written Pole ont un courant de démarrage trois fois moins élevé que les moteurs à induction classiques.
Les moteurs Written Pole ont trouvé un marché pour les secteurs où surviennent de nombreuses perturbations provoquées par exemple par la foudre sur les lignes d’énergie, car ils étaient moins sensibles à ce genre de perturbations que les dispositifs à électronique de puissance.
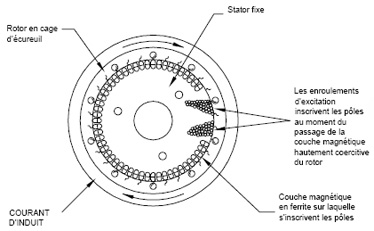
Figure 6-3 : Moteur Written Pole
Moteurs c.c. linéaires
De la même façon qu’un moteur c.c. rotatif, un moteur c.c. linéaire engendre une force mécanique par l’interaction du courant parcourant des conducteurs et du flux magnétique produit par des aimants permanents aux terres rares (réf. 5).
Les moteurs c.c. linéaires comprennent un stator et une glissière de translation. Le stator se compose d’une structure d’acier feuilleté comportant des enroulements de conducteurs disposés dans des encoches transversales. La glissière abrite des aimants permanents, des composants de commutation et une surface d’appui.
Dans certains moteurs c.c. linéaires, une glissière sans balais porte un jeu d’aimants supplémentaires qui agissent sur des capteurs à effet Hall et des interrupteurs à semi-conducteur, et assurent ainsi la commutation des enroulements du moteur. Ce type de moteur peut atteindre une précision de 0,1 micron et ne se détériore pas à l’usage; il peut entraîner directement des charges dans une vaste gamme de poussées et de courses.
Moteurs c.a. linéaires
Les moteurs c.a. linéaires (LIM) se retrouvent souvent dans les systèmes de transport ferroviaires. Les bobines du stator sont encastrées le long de la voie. Parmi les exemples de moteurs c.a. linéaires, on peut citer l’aérotrain de Vancouver et le Tomorrowland Transit Authority à Walt Disney World. Les moteurs LIM permettent d’atteindre des vitesses allant jusqu’à 400 km/h.
Moteurs hybrides
Les moteurs hybrides combinent les propriétés du moteur à réluctance variable et du moteur à aimants permanents, ce qui permet d’exploiter les caractéristiques intéressantes de chacun des deux (Figure 6-4). Ils présentent un couple de détente élevé ainsi qu’un excellent couple de retenue et dynamique, et peuvent fonctionner à des vitesses d’impulsions élevées. Ils présentent généralement des angles de pas compris entre 0,9 et 5 degrés. Si les phases sont mises sous tension une à la fois et dans l’ordre indiqué, le rotor va tourner par incréments de 1,8 degrés. Ce moteur peut aussi être alimenté par deux phases en même temps pour accroître le couple, ou encore par une seule phase, puis par deux phases, puis par une seule phase, pour produire des demi-pas et donc des incréments de 0,9 degré.
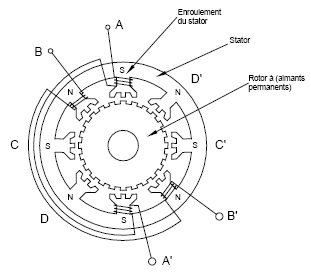
Figure 6-4 : Moteur hybride
Précédent | Table des matières | Suivant
Détails de la page
- Date de modification :